Víceúčelový robot Hercules
Projekt zaměřený na vývoj speciálního víceúčelového zásahového vozidla se systémem operativní změny parametrů, využívaného pro záchranu osob i materiálních hodnot při katastrofách, požárech, povodních, expedicích a protiteroristických akcích vedl na Fakultě robotechniky Vysoké Školy Báňské – Technické univerzity v Ostravě ke vzniku robotu Hercules.

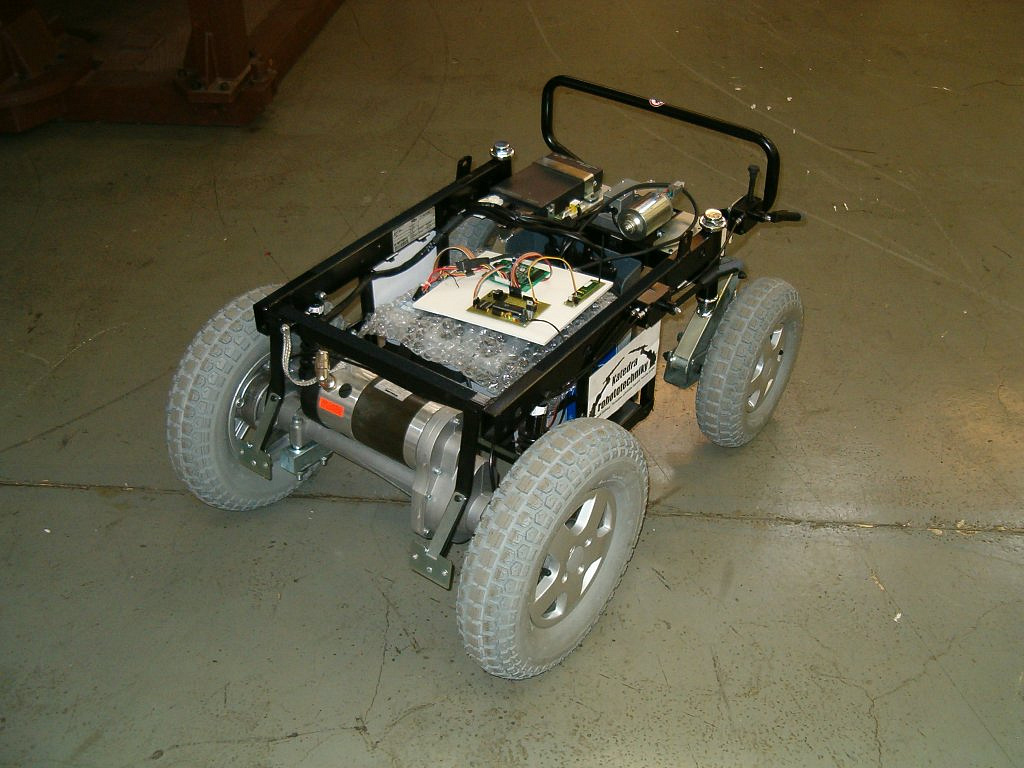
Podvozek
Jako podvozek tohoto mobilního robotu byl použit elektrický invalidní vozík InvaCare, konstrukčně upravený na katedře pro uložení potřebné dodatečné elektroniky a uchycení manipulační nadstavby. Díky použití vysoce optimalizovaného a konstrukčně výborně zvládnutého podvozku má mobilní subsystém robotu vynikající parametry, zejména dojezd na baterie, nosnost, rozsah rychlostí (dokáže jet velmi pomalu i velmi rychle), výkon a manévrovatelnost (zatáčející zadní náprava s velmi malým poloměrem otáčení).
Jako poměrně obtížný oříšek se ukázala problematika řízení funkcí tohoto podvozku (zapínání, přepínání rychlostí, jízda, zatáčení) dálkově pomocí počítače – původní řídicí systém vozíku je založen na specializované a uzavřené sběrnici typu CAN, jejíž protokol se nepodařilo vyluštit. Problém se nakonec podařilo obejít a pojezd je možno plně řídit dálkově z vlastní řídicí aplikace, prostřednictvím katedrou navržené a vyrobené elektroniky.
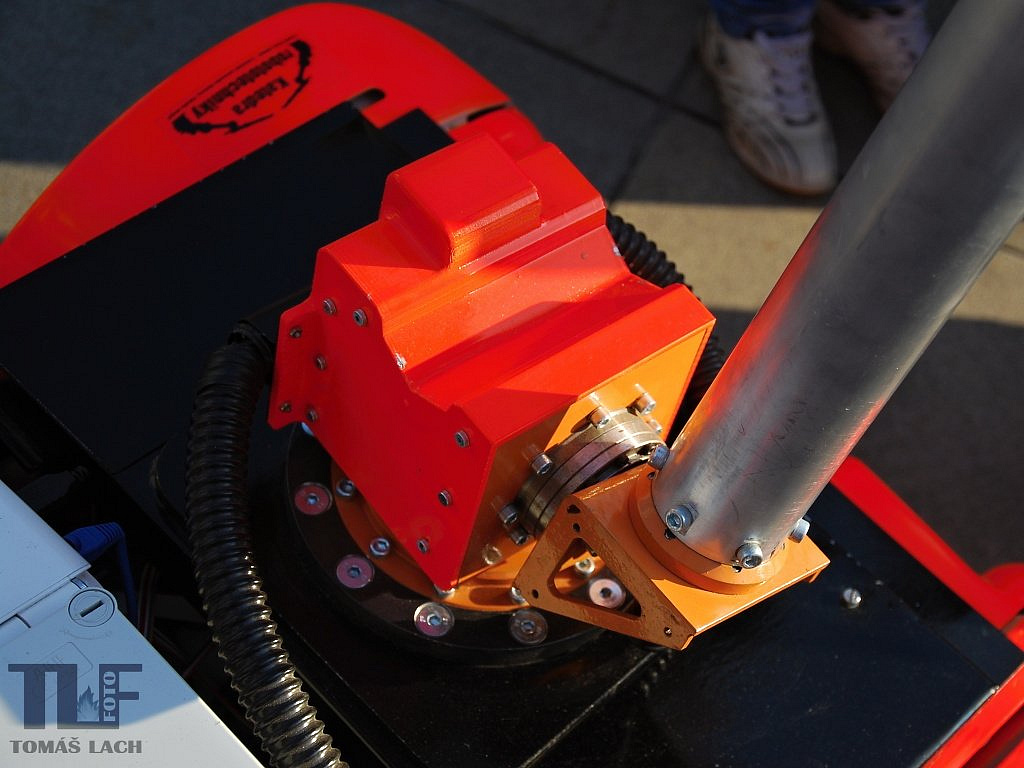
Manipulační nadstavba
Manipulační nadstavba je kompletně navržená a realizovaná katedrou. Jedním z hlavních požadavků byla vzhledem k okolnostem co nejmenší náročnost výroby (časová i finanční), proto jsou např. všechny tři pohonné jednotky totožné, bez ohledu na nižší skutečné zatížení některých kloubů. Konstrukční jednoduchost má však i své výhody, především je nutné zmínit nulové mechanické vůle, díky čemuž je možno provádět velmi přesné a jemné polohování. Manipulátor má 3 stupně volnosti, všechny klouby jsou osazeny diskovými elektromotory MAXON EC90F 60 W doplněnými o harmonické převodovky. Pro nízkoúrovňové řízení pohonů ramene jsou využity jednotky Maxon EPOS propojené CAN sběrnicí.
Na přírubu manipulátoru je možno uchytit libovolný efektor včetně orientačního ústrojí. V současné době je robot vybaven pevným dvoučelisťovým chapadlem se softwarově volitelnou sílou stisku (7 úrovní v každém směru).
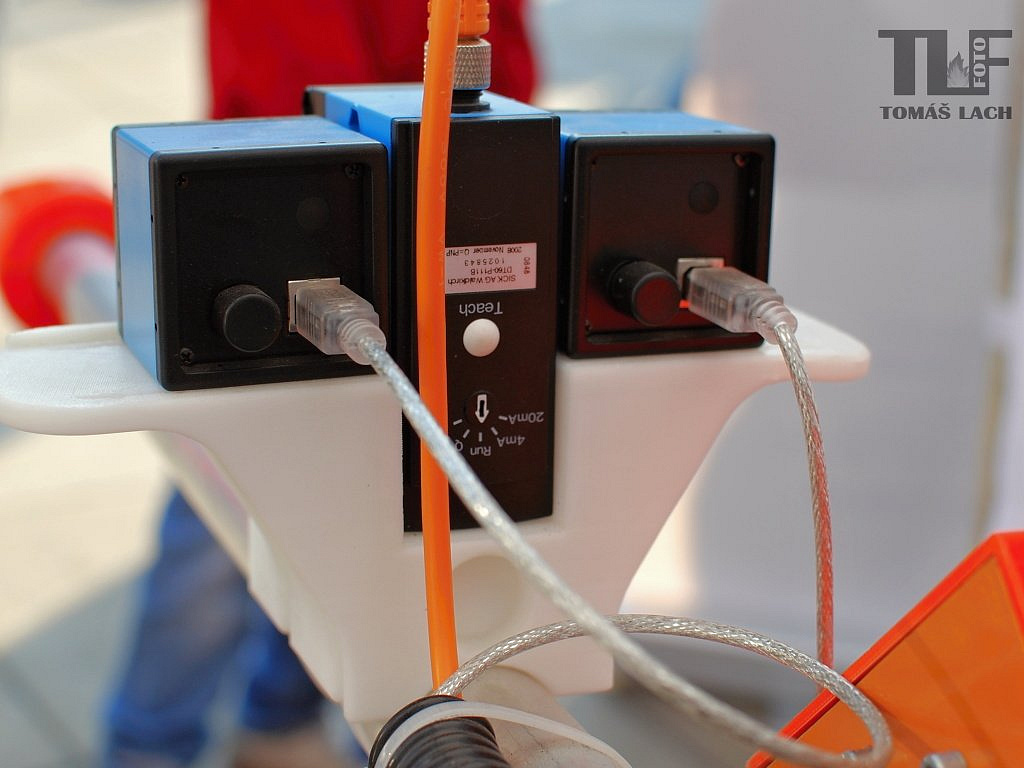
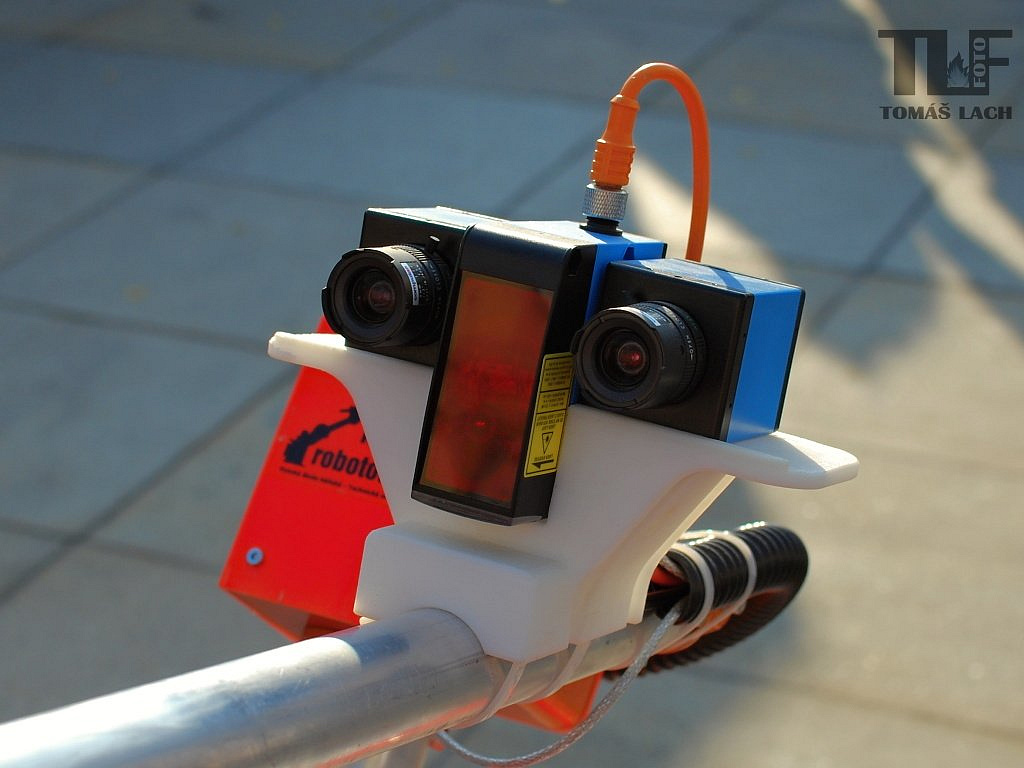
Robot je vybaven stereovizní kamerovou hlavou umístěnou na začátku posledního článku manipulátoru, což umožnuje jak neustálé sledování objektu manipulace, tak rozhlížení pomocí kamer při jízdě nebo průzkumu prostředí. V prostoru mezi kamerami je integrován laserový dálkoměr s dosahem 5 metrů. Podvozek robotu je dále vybaven třetí kamerou určenou pro navigaci při jízdě vzad.
Řízení Herculese
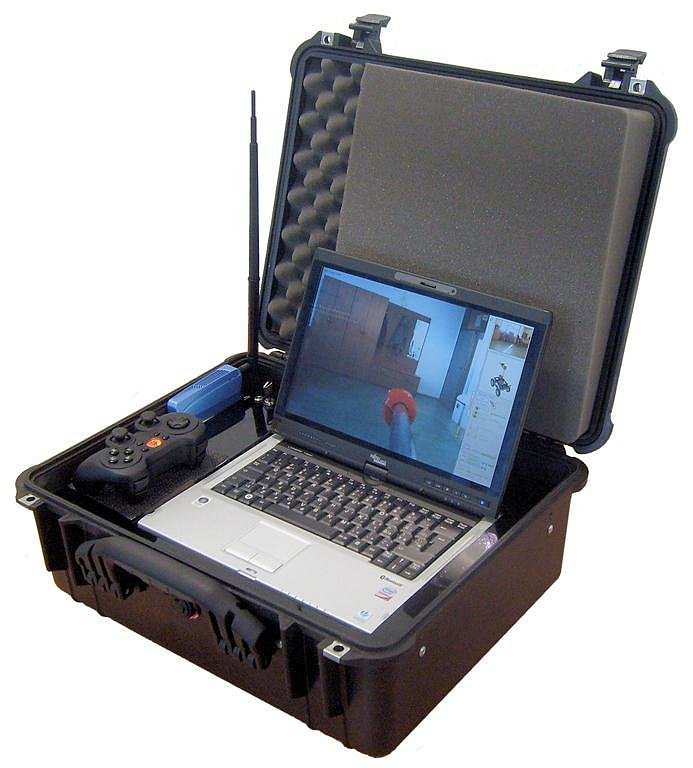
Robot je možno řídit bezdrátově z operátorského pracoviště (kufříku) vybaveného potřebnou elektronikou, akumulátorem, vysílací a přijímací technikou a notebookem s dotekovou obrazovkou. Všechny funkce robotu jsou sloučeny do jedné uživatelsky příjemné a přehledné aplikace; při návrhu uživatelského rozhraní byl hlavní důraz kladen na obraz z kamerového subsystému. Všechny důležité funkce je možno ovládat pomocí jediného bezdrátového ovladače (gamepadu), přičemž manipulátor má režim vhodný pro rozhlížení pomocí kamer a režim vhodný pro manipulaci. Nezbytné informace jsou integrovány přímo do obrazu z kamer, pokročilé funkce a údaje jsou k dispozici na panelu v pravé části aplikace. Operátor má rovněž možnost využít 3D brýle pro stereovizi a/nebo polohový senzor pro ovládání ramene metodou kopírování pohybu ruky v prostoru.
Samotný robot je osazen dvojicí minipočítačů (Via EPIA a netbook Asus EE), z nichž na jednom běží serverová aplikace řídicí pohyby manipulátoru a zpracovávající signály senzorů a ve druhém běží aplikace, která snímá a komprimuje obraz z kamer. Obě tyto serverové aplikace komunikují s klientskou aplikací (operátorský kufřík) pomocí Wi-Fi. Signály pro pojezd robotu jsou přenášeny pomocí rádiového signálu, kvůli jeho vyšší spolehlivosti v budovách a zarušeném prostředí.
V září roku 2010 byl robot doplněn o odporový teploměr pro měření teploty okolí a především o detektor plynů Dräger X-am 5000, který je možno vybavit čidly až pro 5 různých plynů. Údaje z tohoto detektoru (a i z teploměru) jsou samozřejmě přenášeny do operátorského kufříku a zobrazeny přehledně na obrazovce. Robot byl dále doplněn o další krytování a byla vylepšena řídicí aplikace.
Primární motivací pro tyto úpravy byla účast robotu Hercules na největší letecko-armádně-bezpečnostní akce ve střední Evropě – Dnů NATO v Ostravě, kde byl robot největším lákadlem na stánku Fakulty strojní, resp. Katedry robototechniky.
- Podvozek: 4kolový, nezávislé odpružení všech kol
- Řízení: natáčecí zadní náprava (Ackermann)
- Pohon: hnaná přední náprava s diferenciálem
- Motory:
- DC motor pro pojezd
- servo pro zatáčení
- 3 Maxon EC motory pro rameno
- DC motor pro chapadlo
- Senzory:
- laserový snímač vzdálenosti na rameni
- inkrementální snímače polohy v pohonech ramene
- odporový teploměr měřící teplotu okolí
- detektor plynů Dräger X-am 5000
- stereovizní kamerová hlava na rameni
- couvací kamera na podvozku
- Řídicí systém: dálkové bezdrátové řízení všech funkcí z počítače
- Přenos signálů:
- Radiocrafts RC1280HP (868 MHz) pro pojezd
- Wi-Fi (2,4 GHz) pro obraz z kamery (TCP)
- Wi-Fi (2,4 GHz) pro řízení ramene a signály senzorů (UDP)
- Rozměry:
- podvozek: 990 × 710 × 675 mm
- délky článků ramene: 450 mm, 860 mm (dosah 1390 mm)
- Hmotnost: 165 kg (140 kg podvozek + 25 kg rameno)
- Nosnost: 115 kg podvozek; 1,1 kg rameno
info: VŠB-TUO, Fakulta robotechniky
foto: VŠB-TUO a Tomáš Lach